
Адаптивное регулирование по эталонной модели
Теория адаптивных систем возникла в связи с необходимостью решения широкого класса прикладных задач, для которых неприемлемы традиционные методы, требующие знания адекватной математической модели объекта. Качество традиционных (неадаптивных) методов управления тем выше, чем больше априорной информации о самом объекте и условиях его функционирования. На практике достаточно трудно обеспечить точное математическое описание объекта управления. Например, динамические характеристики летательных аппаратов сильно зависят от режима полета, технологических разбросов, состояния атмосферы. В этих условиях традиционные методы часто оказываются неприменимыми либо не обеспечивают требуемое качество системы автоматического управления.
В связи с этим уже на начальном этапе развития теории автоматического управления представлялся весьма эффективным путь построения управляющих систем, не требующих полной априорной информации об объекте и условиях его функционирования.
Эффект приспособления к условиям функционирования в адаптивных системах обеспечивается за счет накопления и обработки информации о поведении объекта в процессе его функционирования, что позволяет существенно снизить влияние неопределенности на качество управления, компенсируя недостаток априорной информации на этапе проектирования систем.
Система управления, автоматически определяющая требуемый закон управления посредством анализа поведения объекта при текущем управлении, называется адаптивной.
Адаптивные системы можно разделить на два больших класса: самоорганизующиеся и самонастраивающиеся.
В самоорганизующихся системах в процессе функционирования происходит формирование алгоритма управления (его структуры и параметров), позволяющего оптимизировать систему с точки зрения поставленной цели управления (ЦУ). Такого рода задача возникает, например, в условиях изменения структуры и параметров объекта управления в зависимости от режима функционирования, когда априорной информации недостаточно для определения текущего режима. При широком классе возможных структур объекта трудно надеяться на выбор единственной структуры алгоритма управления, способной обеспечить замкнутой системе достижение цели управления во всех режимах функционирования. Таким образом, речь идет о синтезе при свободной структуре регулятора. Очевидная сложность постановки задачи не позволяет надеяться на простые алгоритмы ее решения, а следовательно, и на широкое внедрение в настоящее время систем в практику.
Задача существенно упрощается, если структура объекта управления известна и неизменна, а поведение зависит от ряда неизменных параметров. Задача решается в классе самонастраивающихся систем (СНС), в которых структура регулятора задана (заранее выбрана) и требуется определить лишь алгоритм настройки его коэффициентов (алгоритм адаптации).
Самонастраивающейся системой автоматического управления называется система, самостоятельно изменяющая свои динамические характеристики в соответствии с изменением внешних условий с целью достижения оптимального выхода системы. В случае самонастраивающихся систем управления полетом таким оптимальным выходом системы будет оптимальная реакция на внешние возмущения.
СНС делятся на два подкласса: поисковые и беспоисковые. В поисковых СНС минимум (или максимум) меры качества (производительность установки, расход топлива и т.д.) ищется с помощью специально организованных поисковых сигналов. Простейшими поисковыми системами являются большинство экстремальных систем, в которых недостаток априорной информации восполняется за счет текущей информации, получаемой в виде реакции объекта на искусственно вводимые поисковые (пробные, тестовые) воздействия.
В беспоисковых СНС в явном или неявном виде имеется модель с желаемыми динамическими характеристиками. Задача алгоритма адаптации состоит в настройке коэффициентов регулятора таким образом, чтобы свести рассогласование между объектом управления и моделью к нулю. Такое управление называют прямым адаптивным управлением, а системы - адаптивными системами с эталонной моделью.
В случае непрямого адаптивного управления сначала проводят идентификацию объекта, а затем определяют соответствующие коэффициенты регулятора. Подобные регуляторы называются самонастраивающимися.
При прямом адаптивном управлении контуры адаптации работают по замкнутому циклу, что позволяет парировать изменения параметров объекта и регулятора в процессе функционирования. Однако каждый контур самонастройки повышает порядок системы как минимум на единицу, и при этом существенно влияет на общую динамику замкнутой системы.
В случае непрямого адаптивного управления контуры самонастройки работают по разомкнутому циклу и, следовательно, не влияют на динамику системы. Однако все ошибки идентификации, уходы параметров объекта и регулятора существенно влияют на точность управления. В беспоисковых самонастраивающихся системах эталонная модель может быть реализована в виде реального динамического звена (явная модель) или присутствовать в виде некоторого эталонного уравнения, связывающего регулируемые переменные и их производные (неявная модель). В неявной модели коэффициенты эталонного уравнения являются параметрами алгоритма адаптации.
На рисунке 1 показан один из часто используемых в исполнительных приводах вариантов адаптивного управления, где параметры регулятора настраиваются управляющим компьютером по эталонной модели.
Эталонная модель показывает идеальную желаемую реакцию системы на задающий сигнал g(t). В качестве эталонной модели применяют типовые звенья систем автоматического управления (например, апериодическое звено). Параметры ПИД-регулятора (пропорционально-интегрально-дифференциальный регулятор) настраиваются так, чтобы минимизировать рассогласование между выходом модели и реальной системы.
Задача контура настройки состоит в том, чтобы свести это рассогласование к нулю за определенное время с гарантией устойчивости переходного процесса. Данная проблема далеко не тривиальна – можно показать, что она не решается при линейных соотношениях «ошибка – коэффициенты регулятора». Например, в литературе предложен следующий алгоритм настройки параметров:
где k – настраиваемые коэффициенты ПИД-регулятора; А – постоянный коэффициент, задающий скорость адаптации.
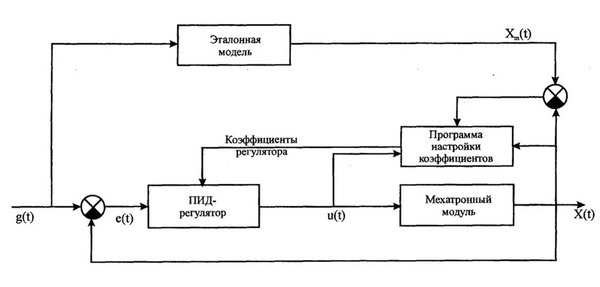
Рис. 1. Блок-схема адаптивной системы с эталонной моделью
Функция градиента определяет чувствительность ошибки c(t) к вариации коэффициентов регулятора. Абсолютная устойчивость замкнутой системы, которая является существенно нелинейной, обеспечивается подбором параметра А в программе настройки. Таким образом, управляющий компьютер для реализации адаптивного управления по данной схеме должен в реальном времени решать следующие задачи:
- формировать задающий сигнал для управляемой системы;
- рассчитывать идеальную реакцию по эталонной модели;
- вычислять коэффициенты регулятора в соответствии с программой настройки, определять текущую ошибку и выдавать сигнал управления на вход мехатронного модуля.
Помимо рассмотренной блок-схемы с эталонной моделью известны и другие методы автоматической настройки параметров и структуры регуляторов.
 УЧЕНЬЕ - СВЕТ, А НЕУЧЕНЬЕ - ЧУТЬ СВЕТ И НА РАБОТУ!
УЧЕНЬЕ - СВЕТ, А НЕУЧЕНЬЕ - ЧУТЬ СВЕТ И НА РАБОТУ!